Rumah
>
Produk
>
Otomatis Barrier Gate
>
Rumah
>
Produk
>
Otomatis Barrier Gate
>
|
|
| Tempat asal | Shenzhen, Cina. |
| Nama merek | SINOMATIC |
| Sertifikasi | CE/ ISO |
| Nomor model | SN-BG130-DC |
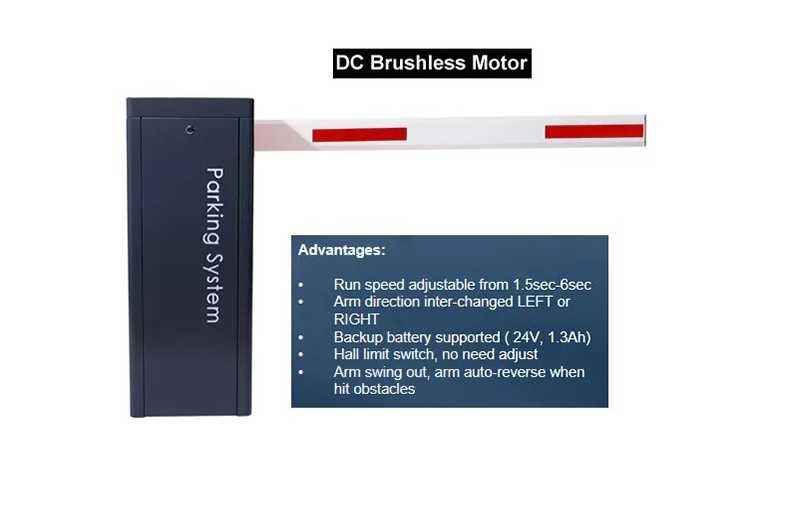
Hambatan Parkir Otomatis 140W, Sistem Gerbang Tempat Parkir Dengan Lengan Ayun Keluar
Parameter teknik
1 Suhu kerja (motor): -35 ℃ ~ + 85 ℃
2 Nilai tegangan: DC24V
3 Kecepatan lari: 1.5s-8s
4 Nilai saat ini: 8.58A
5 Nilai daya: 140W
6 Kecepatan tanpa beban: 1850rpm
7 Kecepatan terukur: 1400rpm
8 Daya Keluaran: 56.8Nm
9 Kelembaban relatif: ≤90%
10 Jarak kendali jarak jauh: ≤100M (di tempat terbuka)
11 Gelar IP: IP44
12 Panjang lengan maksimal: 6M
FOTO PRODUK![]()
![]()
Fitur dan fungsi
1 Kecepatan lari dapat disesuaikan dari 1,5 detik hingga 8 detik
2 Dapat dengan cepat dipertukarkan
3 Buka gerbang penghalang dengan roda motor saat matikan, setel ulang secara otomatis setelah dihidupkan
4 Lengan engkol tiga struktur gerakan tautan melengkung, operasinya stabil
5 Remote control nirkabel buka / tutup
6 Fungsi mundur otomatis (gaya disesuaikan)
7 Konektor fotosel inframerah tersedia
Konektor detektor 8 loop tersedia.
9 Terintegrasi dengan baik dengan peralatan sistem parkir mobil, dengan kontrol kabel (harus sinyal sakelar)
10 Konektor untuk lampu lalu lintas (AC220V, daya kurang dari 40W)
11 Menawarkan sinyal kontak kering untuk sistem parkir mobil (COM, NC, NO)
12Auto-delay saat menutup (dapat disesuaikan)
13 RS485 atau antarmuka komunikasi jaringan CAN (tidak perlu memasang modul)
14 Menghitung antarmuka
15 antarmuka baterai cadangan 24V (Dapat diisi dengan menggunakan energi matahari)
Tabel perbandingan kecepatan panjang lengan
| Kode menu | Jumlah | Nama kode menu | Default | satuan | Catatan |
| H00-00 | 25-95 | Penyesuaian kecepatan terbuka | 40 | Siklus kerja PWM yang sesuai 25% -95%, ukuran langkah adalah 1 | |
| H00-01 | 25-95 | Tutup penyesuaian kecepatan | 40 | Siklus kerja PWM yang sesuai 25% -95%, ukuran langkah adalah 1 | |
| H00-02 | 5-40 | Buka di tempat, perlambat sudut | 35 | Semakin besar nilai sudutnya, semakin kecil kemungkinannya untuk menggoyangkan lengan saat berada di tempatnya. | |
| H00-03 | 5-40 | Tutup di tempat, perlambat sudut | 35 | Semakin besar nilai sudutnya, semakin kecil kemungkinannya untuk menggoyangkan lengan saat berada di tempatnya. | |
| H00-04 | 1-20 | Buka mempercepat penyesuaian | 10 | MS | Semakin kecil angkanya, semakin cepat kecepatannya |
| H00-05 | 1-20 | Tutup penyesuaian akselerasi | 10 | MS | Semakin kecil angkanya, semakin cepat kecepatannya |
| H00-06 | 1-30 | Buka di sudut tempat | 2 | gelar | ukuran langkahnya adalah 1 |
| H00-07 | 1-30 | Buka di sudut tempat | 1 | gelar | ukuran langkahnya adalah 1 |
| H00-08 | 7-13 | Penyesuaian gaya mundur otomatis | 10 | SEBUAH | ukuran langkahnya adalah 1 |
| H00-09 | 0-90 | Tunda penyesuaian penutupan | 0 | Detik | ukuran langkah adalah 100 ; 0 tidak menutup secara otomatis`` Nilai lain akan menutup secara otomatis; Parameter ini untuk ketika tidak ada sinyal detektor loop dan kesempatan operasi non-otomatis |
| H00-10 | 10-50 | Penyesuaian kecepatan periksa sendiri | 30 | Sesuai siklus tugas PWM 10% -50%, ukuran langkah adalah 1 | |
| H00-11 | 0-2 | Mode pemeriksaan mandiri | 0 | 0: tidak beroperasi secara otomatis ; 1: beroperasi secara otomatis, lepaskan setelah matikan ; 2: beroperasi secara otomatis, Memori kegagalan daya | |
| H00-12 | 0-5 | Penyesuaian gaya self-lock (Tidak valid) | 3 | ||
| H00-13 | 1-20 | Waktu perlambatan motor saat berhenti | 5 | Semakin besar pengaturannya, semakin lama waktu jeda | |
| H00-14 | 0-1 | Arah operasi default setelah swa-uji | 0 | 0: Penutupan, 1: pembukaan | |
| H00-15 | 1-10 | Jumlah pasangan tiang (Tidak valid) | 4 | Hanya digunakan untuk menampilkan nilai kecepatan motor dengan benar | |
| H00-16 | 1-32 | Alamat komunikasi RS485 | 1 | Hingga 32 budak dapat dihubungkan | |
| H00-17 | 0-2 | Tingkat komunikasi RS485 | 0 | 0: 9600,1: 19200,2: 38400 ; Ubah parameter dan akan valid setelah dinyalakan kembali. | |
| H00-18 | 0-1 | Jika self-test setelah power menyala | 1 | 0: tidak ada self-test setelah power on, 1: self-test setelah power on | |
| H00-19 | 0-3 | Penyesuaian swauji manual | 2 | 0: Tidak valid secara manual, 1: Tombol SET Keyboard, 2: valid remote control, 3, tombol Keyboard SET dan remote control keduanya valid | |
| H00-20 | 0-15 | Memantau indeks pengaturan parameter | 7 | 7, waktu operasi (ms): 0 ~ 9000 8, Waktu operasi kumulatif: 0`99999999 9, waktu operasi secara otomatis: 0 ~ 99999999 10, Waktu tabrakan: 0 ~ 99999999 11, Penutupan di tempat kali: 0 ~ 99999999 12, Waktu hidup (menit): 0 ~ 99999999 13, waktu penyalaan: 0 ~ 99999999 14, Status port input: Tampilan biner 15, Kode kesalahan: 0 ~ 7 | |
| H00-21 | 0-3 | reset | 0 | 1: penyesuaian istirahat | |
| H00-22 | 0-1 | Mode keluaran LED | 0 | 0: Jangan berkedip bergantian selama operasi ; 1: Izinkan berkedip |
Hubungi Kami Kapan Saja